
在PKS的众多功能块门类中有一类常用的功能块叫做常规控制类(REGCTL,全名叫Regular Control)。著名的PID控制,分程控制,比值控制,爬坡控制,前馈控制……都出自于这一门类,在控制功能块中可谓名门望族。这些控制方案在现场控制中发挥了巨大的作用,占据了现场设备控制的半壁江山。
在装置设备以及信号回路都正常的情况下,各控制回路各司其职,有条不紊的控制着现场装置;但是,生产不可能永远如人所愿,安稳无事。在某些情况下,现场的设备控制面临各种意外问题,如反馈信号失真,人为干预,安全联锁等等……在这些不安生的情况下,如何控制好现场的阀位和设备动作就显得很重要了。为此,系统在这些常规控制方案中设置了不少应急预案。

如图,常见的应急预案有五个,下面逐一解释一下五个方案具体的行为:
NO_SHED:
无动于衷。如果选择这个方案,那么当常规控制遇到紧急情况的时候,该点不会采取任何应对措施,现场的设备会如何动作也不一定,取决于出问题具体是什么。这是一种偷懒且消极的态度。
SHEDHOLD
给我稳住!如果选择这个方案,那么当常规控制遇到紧急情况的时候,控制点会做这两件事:1)甭管之前调节器的控制模式是自动(AUTO)还是串级(CAS),一律切为手动模式(MAN),确保操作员第一时间能够对该设备手捏把攥;2)OP值保持在紧急情况发生之前那一刻的值上。SHEDLOW
底线处理。如果选择这个方案,那么当常规控制遇到紧急情况的时候,控制点会做这两件事:1)甭管之前调节器的控制模式是自动(AUTO)还是串级(CAS),一律切为手动模式(MAN),确保操作员第一时间能够对该设备手捏把攥;2)OP值强制为其下限值。SHEDHIGH
最大输出。如果选择这个方案,那么当常规控制遇到紧急情况的时候,控制点会做这两件事:1)甭管之前调节器的控制模式是自动(AUTO)还是串级(CAS),一律切为手动模式(MAN),确保操作员第一时间能够对该设备手捏把攥;2)OP值强制为其上限值。SHEDSAFE
安全输出。如果选择这个方案,那么当常规控制遇到紧急情况的时候,控制点会做这两件事:1)甭管之前调节器的控制模式是自动(AUTO)还是串级(CAS),一律切为手动模式(MAN),确保操作员第一时间能够对该设备手捏把攥;2)OP值强制为预设的安全输出值。安全输出值在哪设置呢?以PID为例,如下图:
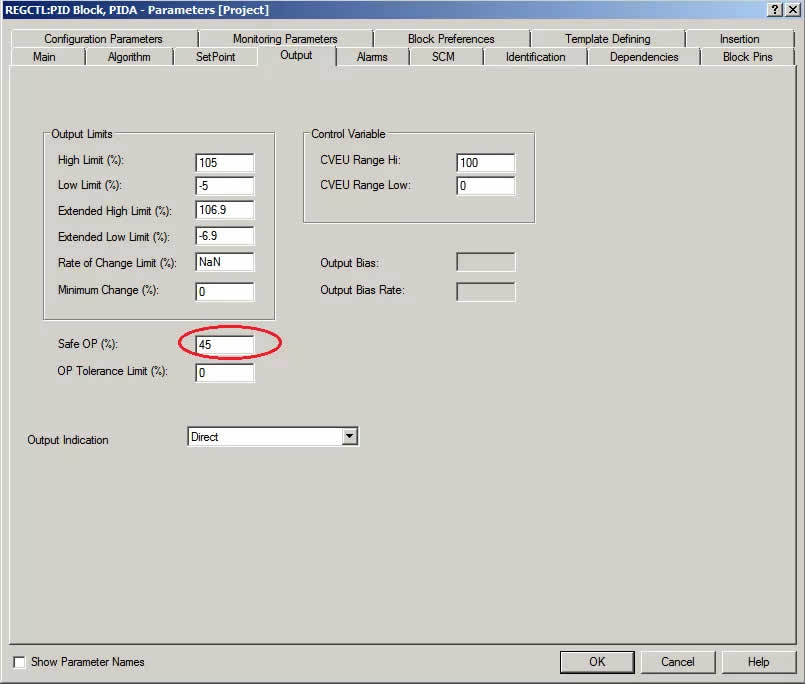
该PID点的安全输出值为45,也就是说当紧急情况发生时,调节器将输出值强制为45%。
下面咱们来讨论一下,上面的五种应急预案,在什么样的紧急情况下会使用。一般来说在3种情况下会用到应急方案。
01、输入信号为手动输入的假值。PV既然是假值,那实际现场阀位就不能以此作数,煞有介事的按照计算的出的OP值动作。因此,当调试需要手动给假PV值这种情况下,必须选择应急预案来处理现场的阀位,如图:
02、安全相关的条件触发安全联锁。我们在PKS课堂上介绍过设备控制功能块DEVCTLA有各种联锁参数。其实常规控制功能块里也有联锁参数,但是常规控制块的联锁参数没有DEVCTLA的那么全,一般只有安全联锁(Safety Interlock)。常规控制块中安全联锁参数的名字叫SIFL,默认情况下隐藏了,你可以在Block Pin属性页中让它显示出来,如图:
安全联锁是个开关量引脚,可以前置安全相关的逻辑,当逻辑满足条件触发联锁,那么可以在5种预案中选择其中的一个。如下图:
03、输入信号为坏值。当AI卡件线路故障(可能卡件本身故障,也可能是外部线路故障),通过AI通道进入到DCS系统的信号可能是一个错误的或者是个无法识别的信号。这时PV会显示为BADPV,表示系统也没把握正确识别这个信号。而PV值最后是会进入常规控制点里进行计算的,PV值都保证不了,怎么能要求以此计算的结果是正常的呢?所谓一步踏错步步错,这种情况下,系统认为算出的OP值也是不可靠和不能用的,即系统认为的Bad Control。我们需要选择一种预案来应对这种情况。如图:
综上,在这些情况下,我们通过预设处理方案,达到妥善处理现场设备动作,避免因为设备失控导致工况恶化。